到达我们
 + 44 7362049920
+ 44 7362049920
生物技术:一个印度日报》
ISSN(打印):0974 - 7435
所有提交的电磁系统将被重定向到在线手稿提交系统。作者请直接提交文章在线手稿提交系统各自的杂志。
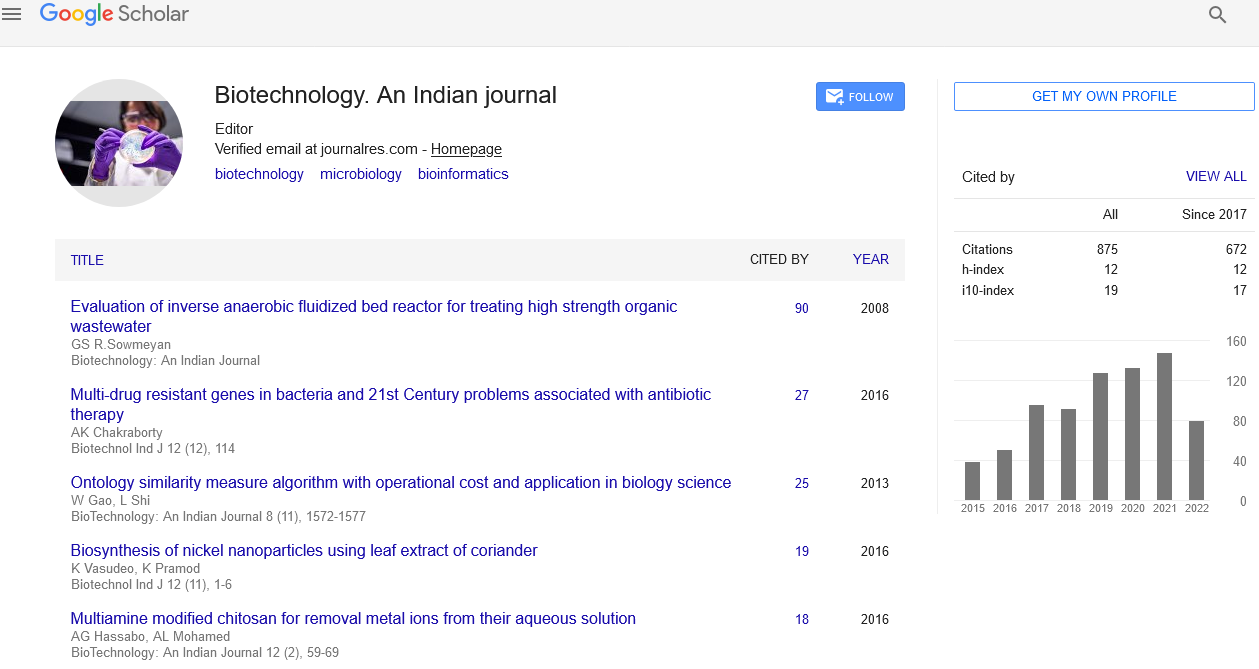
谷歌学者引用报告
引用次数:875
编入索引中
- 卡斯商学院
- 谷歌学术搜索
- 打开J门
- 中国国家知识基础设施(CNKI)
- CiteFactor
- 宇宙如果
- 目录索引》杂志上的研究(DRJI)
- 秘密搜索引擎实验室
- 欧元的酒吧
- ICMJE
查看更多